
SO-ARM101 を組み立てた ― マステなし深夜、初テレオペまで
前回の調達編の末尾に、「次回は深夜にサーボのIDと向きで格闘した記録を書く」と予告しました。その通りになりました。
パーツが手元に揃ったのは5月上旬。Seeedからのサーボキットとメルカリの3Dパーツを並べたとき、「あとは組み立てるだけ」という気持ちになりました。ところが実際に手を動かし始めると、小さいところで何度も止まりました。
サーボ12本、どれがどれか
SO-ARM101の1セット(リーダーアーム+フォロワーアーム)には、合計12本のサーボを使います。Seeedから届くPro版キットには12本のFeetech STS3215が入っていますが、箱から出した時点では全部が同じに見えます。

組み立てを始めると、「今手に持っているこれは何番のIDを割り当てるべきサーボなのか」がすぐにわからなくなります。手がふさがっているときに「これさっきのやつだっけ」となる感覚です。
マスキングテープで番号を貼っておけばよかった、と後から気づきました。公式ガイドや他の人のブログにはIDの設定手順は書いてありますが、「先に物理的に区別できるようにしておけ」とは書いていません。小さいことですが、実際に詰まると地味にストレスになります。これから組み立てる人は、サーボを箱から出したらすぐにマステで仮番号を貼ることをすすめます。
サーボのID設定と電圧の確認
LeRobotでSO-ARM101を動かすには、各サーボに1〜6のIDを書き込む必要があります。出荷状態では全サーボのIDが同じ値になっているため、1本ずつPCに接続してIDを変更する作業が必要です。
接続にはLeRobotに同梱されているサーボ制御基板を使います。基板経由でUSBをPCにつなぎ、LeRobotのスクリプトでIDを書き込んでいきます。npaka さんの解説記事がこの手順を日本語で追えるのでかなり助かりました(末尾の参考資料を参照)。
このとき電圧の確認も必要です。Pro版サーボ(STS3215 C018)は12V駆動です。電源アダプタの設定を間違えると最悪サーボが壊れるので、基板に接続する前に必ず確認してください。
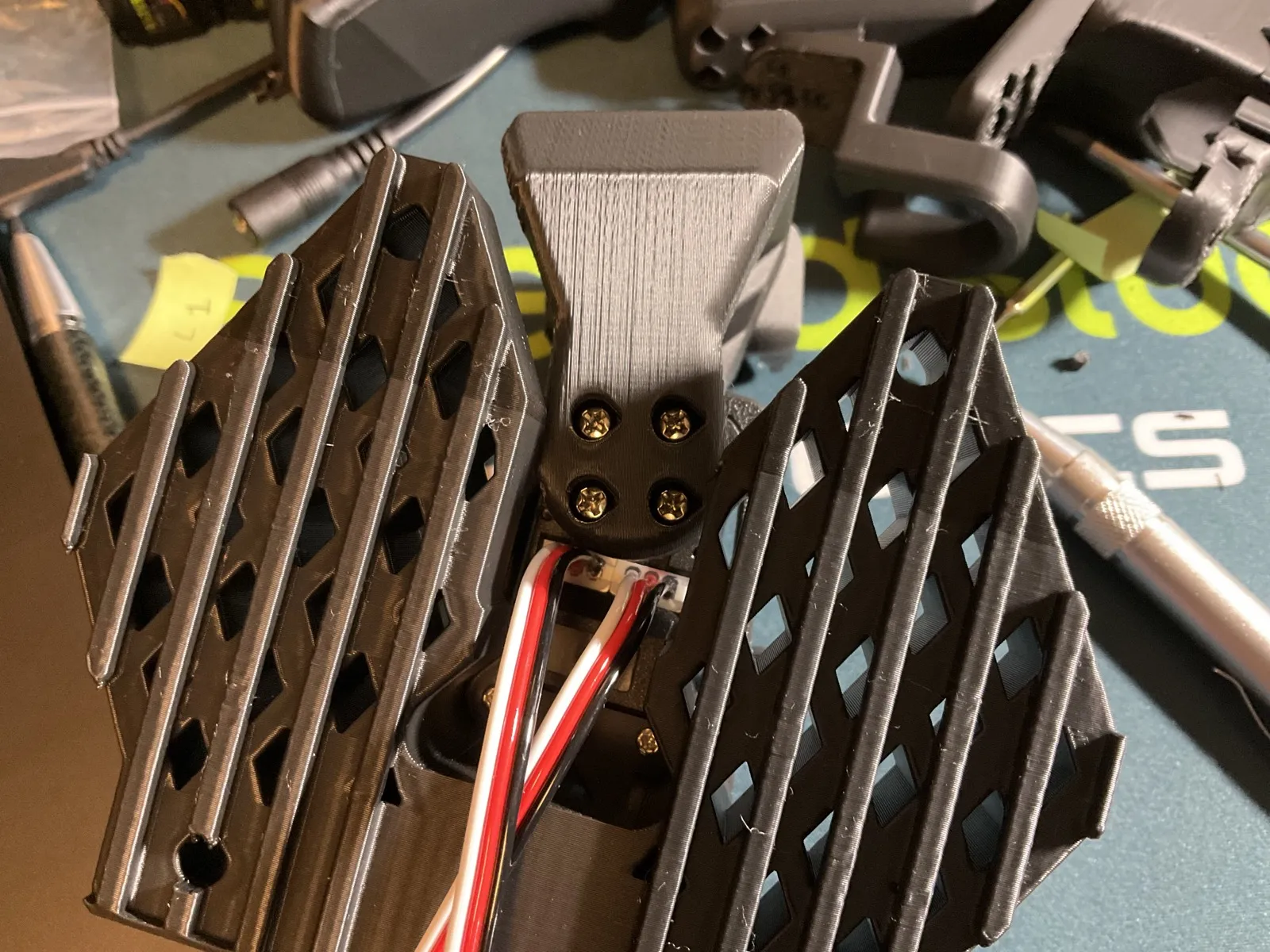
向きの確認で動画を何度も止める
物理的な組み立てで一番時間がかかったのが、サーボの取り付け方向です。
どの向きにサーボを固定するかは、完成後の動きに直結します。ここを間違えると後から直すのが面倒なので、慎重に確認しながら進めました。公式の組み立て動画を何度も一時停止して、自分の手元と見比べる作業を繰り返しました。文章や静止画だけでは伝わりにくい部分なので、動画との照合が一番確実です。

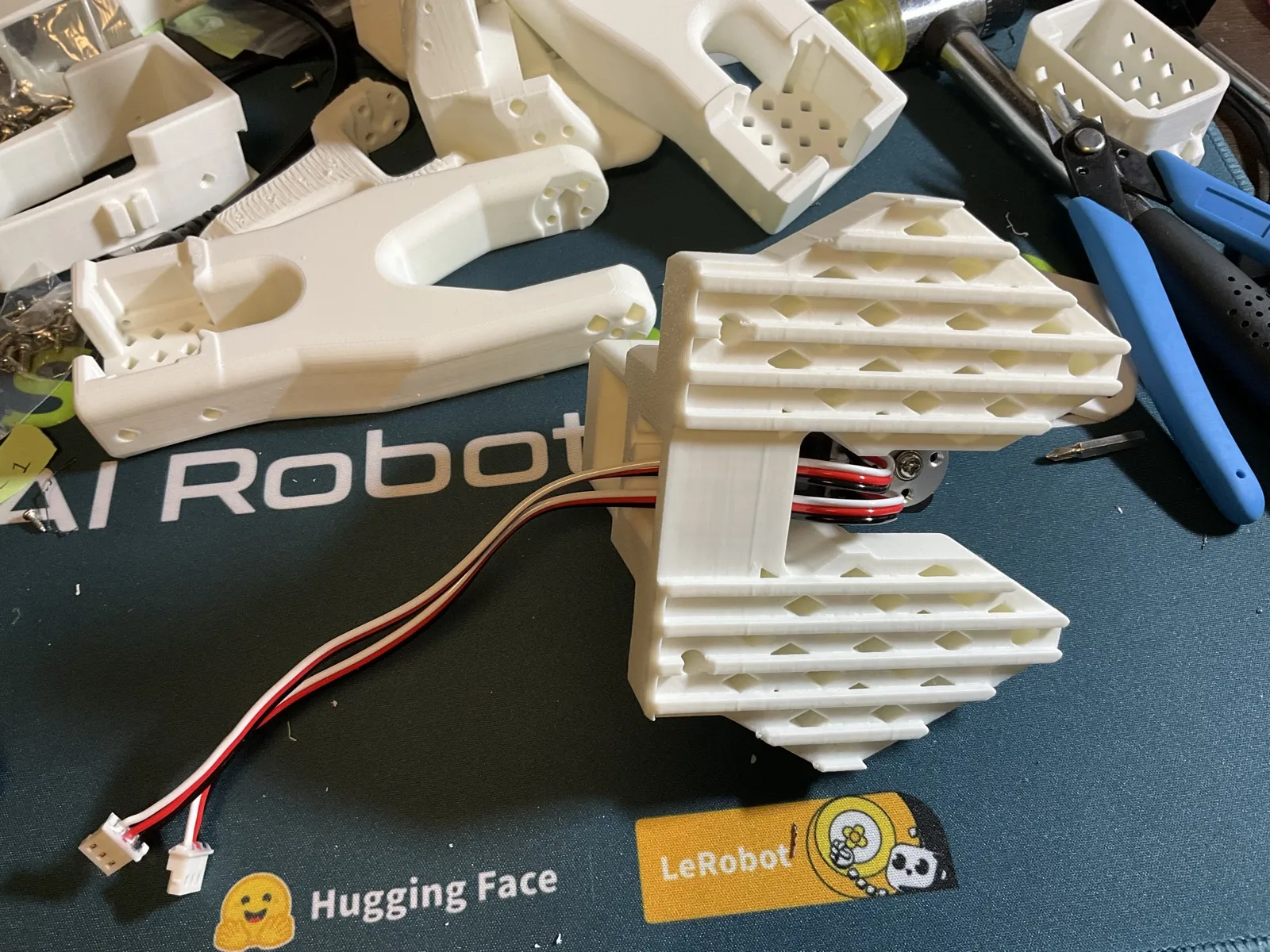
サーボを組み込んで配線をつなぎながら、胴体がだんだん形になっていきます。

フォロワーアームの組み立てが終わったら、次はリーダーアーム(白)です。白いパーツはフォロワーアーム(黒)と形が異なる箇所もあるので、同じつもりで進めると向きを間違えることがあります。ここも動画と見比べながら慎重に進めました。

初テレオペレーション
組み立てが終わったら、次はLeRobotのセットアップです。pip install lerobot でインストールして、テレオペレーション用のスクリプトを実行するだけです。自分はClaude Codeにスクリプトの実行を手伝ってもらいながら進めました。
リーダーアームを手で動かした瞬間、フォロワーアームが追いかけてきました。部品を発注してから1ヶ月弱、2本のアームが連動して動くのを確認できました。
全工程フォトログ
開封から初テレオペまで、時系列で並べた写真です。



















次回:キャリブレーション
テレオペレーションはできましたが、模倣学習に進むにはキャリブレーションが必要です。各関節の可動範囲を正確に記録し、学習データの精度を上げる作業です。
次回の記事でキャリブレーションと、実際にタスクを学習させた話を書く予定です。
参考にした資料:
SO-101 入門 (3) - アームの組み立て|npaka
「SO-101」のアームの組み立て手順をまとめました。 ・SO-101 - LeRobot 前回 1. 前準備 1-1. モーターの種類 ・フォロワーアーム フォロワーアームには、ギア比 1/345 の「STS3215」モーターを6個使用します。 ・Feetech STS3215-C018 (ギア比 1/345、12V) x 6 ※PROの場合 ・Feetech STS3215-C001 (ギア比 1/345、7.4V) x 6 ※ PROでない場合 ・リーダーアーム リーダーアームには、自重を支えつつ、大きな力をかけずに動かすことができる

【初心者でも】ロボットアーム SO-101組み立てレポート ※ 旧手順【ロボット作りたい】 - ABEJA Tech Blog
2025/06/16: 情報を更新しました! 新しい手順は下記をご覧いただけると幸いです! tech-blog.abeja.asia 本記事の手順は古いので、旧手順を何かで参照したい場合にお使いください! 本記事の手順が古いことを判った上で参照したい方は進んでください! はじめに 先にまとめ 事前準備 パーツの入手 uvのインストール 組み立て手順 LeRobotのインストール モーターの設定 電源の接続 各モーターバスに関連付けられたUSBポートを見つける 設定ファイルの更新 モーターIDの設定 ジョイントの組み立て ファームウェアの更新(Windows PCのみで可能) キャリブレーション…
SoArm in Lerobot | Seeed Studio Wiki
記事の更新をメールで受け取る
質問・リクエストを送る
記事についての質問や、取り上げてほしいテーマがあればお気軽にどうぞ。いただいた質問はブログ記事として回答し、Q&Aページで公開することがあります。